全部
▼
搜索
熱搜:
位置:中冶有色 >
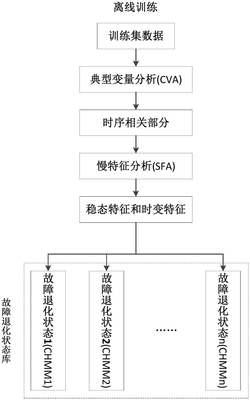
> 基于典型變量分析與隱馬爾可夫的送風(fēng)機(jī)故障預(yù)測方法
 152
編輯:管理員
來源:浙江大學(xué)
152
編輯:管理員
來源:浙江大學(xué)
 分享 0
分享 0
 舉報 0
舉報 0
 收藏 0
收藏 0
 反對 0
反對 0
 點(diǎn)贊 0
點(diǎn)贊 0

 中冶有色技術(shù)平臺
中冶有色技術(shù)平臺粒礦物選礦技術(shù)大會")
 2025年03月25日 ~ 27日
2025年03月25日 ~ 27日 創(chuàng)新大會") 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日 新大會") 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日 術(shù)會議") 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日  2025年04月24日 ~ 27日
2025年04月24日 ~ 27日