權(quán)利要求
1.一種挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)��,其特征在于����,包括:
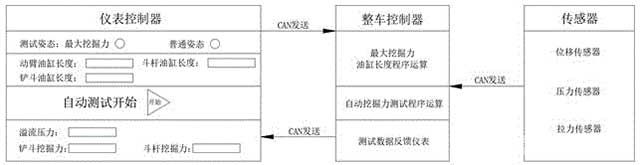
儀表控制器,用于獲取挖掘機(jī)的工作裝置參數(shù)���,根據(jù)工作裝置參數(shù)來判斷挖掘機(jī)測(cè)試姿態(tài)���,在判斷挖掘機(jī)測(cè)試姿態(tài)后,得出動(dòng)臂油缸、斗桿油缸����、鏟斗油缸三個(gè)油缸長(zhǎng)度信息,同時(shí)將自動(dòng)測(cè)試開始指令及三個(gè)油缸長(zhǎng)度信息發(fā)送給整車控制器;接收整車控制器發(fā)送的測(cè)試數(shù)據(jù)并進(jìn)行判斷���,在判斷合格后記錄鏟斗挖掘力及斗桿挖掘力數(shù)據(jù);不合格�,繼續(xù)發(fā)送三個(gè)油缸長(zhǎng)度信息給整車控制器����,直至測(cè)試數(shù)據(jù)記錄合格結(jié)束;
整車控制器接收儀表控制器發(fā)送的三個(gè)油缸長(zhǎng)度信息及自動(dòng)測(cè)試指令后,自動(dòng)挖掘力測(cè)試程序開始工作���,通過最大挖掘力油缸長(zhǎng)度程序計(jì)算出動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a��、斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b����、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c����、拉繩應(yīng)調(diào)節(jié)的高度、角度�,拉繩自動(dòng)調(diào)節(jié)到指定位置;同時(shí)將傳感器發(fā)送的測(cè)試數(shù)據(jù)反饋給儀表控制器;
傳感器用于采集在鏟斗油缸和斗桿油缸緩慢加載過程中主泵溢流時(shí)的測(cè)試數(shù)據(jù)�����,同時(shí)將測(cè)試數(shù)據(jù)發(fā)送給整車控制器����。
2.根據(jù)權(quán)利要求1所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)����,其特征在于����,所述挖掘機(jī)測(cè)試姿態(tài)包括最大挖掘力測(cè)試姿態(tài)和普通測(cè)試姿態(tài);若挖掘機(jī)測(cè)試姿態(tài)為最大挖掘力姿態(tài),通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)動(dòng)臂油缸���、斗桿油缸���、鏟斗油缸三個(gè)油缸長(zhǎng)度;若測(cè)試姿態(tài)為普通姿態(tài)或儀表控制器判斷測(cè)試數(shù)據(jù)不合格時(shí),則需手動(dòng)輸入動(dòng)臂油缸�、斗桿油缸、鏟斗油缸三個(gè)油缸長(zhǎng)度��。
3.根據(jù)權(quán)利要求2所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)�����,其特征在于,所述測(cè)試數(shù)據(jù)包括動(dòng)臂油缸����、斗桿油缸和鏟斗油缸的壓力、位移��、拉力數(shù)據(jù)���。
4.根據(jù)權(quán)利要求3所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)����,其特征在于��,所述傳感器包括安裝在動(dòng)臂油缸���、斗桿油缸和鏟斗油缸上的拉線位移傳感器�����、壓力傳感器�����、安裝在地錨與鏟斗之間的測(cè)力計(jì)傳感器�。
5.一種應(yīng)用權(quán)利要求4所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)的方法,其特征在于����,包括以下步驟:
(1)通過儀表控制器確定測(cè)試姿態(tài),得出動(dòng)臂油缸�、斗桿油缸、鏟斗油缸三個(gè)油缸長(zhǎng)度�����,并把數(shù)據(jù)發(fā)送給整車控制器;
(2)通過整車控制器自動(dòng)計(jì)算動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a�����、斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b���、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c及拉繩應(yīng)調(diào)節(jié)的高度、角度�,拉繩自動(dòng)調(diào)節(jié)到指定位置;
(3)在鏟斗油缸及斗桿油缸的緩慢加載中,主泵出現(xiàn)溢流后��,傳感器將測(cè)試數(shù)據(jù)反饋給整車控制器�����,整車控制器將測(cè)試數(shù)據(jù)傳送給儀表控制器;
(4)儀表控制器進(jìn)行判斷,記錄合格后的鏟斗挖掘力及斗桿挖掘力數(shù)據(jù);不合格�,則繼續(xù)將動(dòng)臂油缸、斗桿油缸�����、鏟斗油缸三個(gè)油缸長(zhǎng)度發(fā)送給整車控制器����,以此循環(huán)(2)、(3)�、(4),直至判斷記錄合格結(jié)束����。
6.根據(jù)權(quán)利要求5所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試方法,其特征在于�����,所述三個(gè)油缸長(zhǎng)度的長(zhǎng)度信息獲取方式是根據(jù)挖掘機(jī)測(cè)試姿態(tài)來選擇下述其一方式進(jìn)行獲?�。?
(1)若挖掘機(jī)測(cè)試姿態(tài)為最大挖掘力姿態(tài)�����,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度;
(2)若測(cè)試姿態(tài)為普通姿態(tài)或儀表控制器判斷測(cè)試數(shù)據(jù)不合格時(shí),則需手動(dòng)輸入三個(gè)油缸長(zhǎng)度���。
7.根據(jù)權(quán)利要求6所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試方法��,其特征在于���,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度的步驟如下:
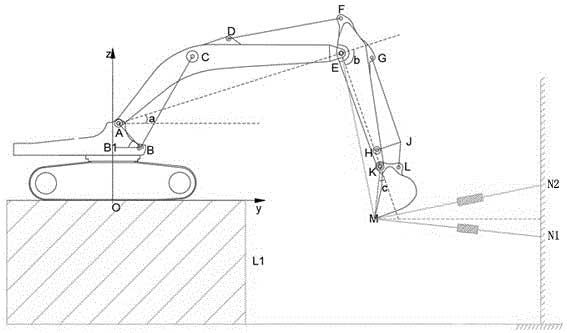
在已知挖掘機(jī)的型號(hào)及工作裝置尺寸的情況下,以回轉(zhuǎn)中心與水平線的交點(diǎn)為絕對(duì)坐標(biāo)系的原點(diǎn)o�����,正前方為水平軸y正方向�,正上方為縱軸z正方向建立二維坐標(biāo)系�,同時(shí)為了便于計(jì)算,在挖掘機(jī)工作裝置上設(shè)置有A-M點(diǎn)位����,用于標(biāo)識(shí)及坐標(biāo)點(diǎn)計(jì)算,A表示動(dòng)臂后支座絞點(diǎn)��,B表示動(dòng)臂油缸大腔絞點(diǎn)��,B1表示B點(diǎn)水平軸負(fù)方向平移點(diǎn),不代表具體位置��,只做方向使用��,C表示動(dòng)臂中支座即動(dòng)臂油缸小腔絞點(diǎn)����,D表示斗桿油缸大腔絞點(diǎn),E表示動(dòng)臂前支座即斗桿后支座絞點(diǎn)�,F(xiàn)表示斗桿油缸小腔絞點(diǎn),G表示鏟斗油缸大腔絞點(diǎn)���,J表示鏟斗油缸小腔絞點(diǎn)�,H表示斗桿中支座絞點(diǎn)��,K表示斗桿前支座即鏟斗后耳板絞點(diǎn)���,L表示鏟斗前耳板絞點(diǎn)�,M表示斗齒尖;
動(dòng)臂姿態(tài):
BC長(zhǎng)度為動(dòng)臂油缸最小到最大尺寸中�����,間隔1mm循環(huán)計(jì)算,
a=acos((AB^2+AC^2-BC^2)/(2*AB*AC))-∠EAC-∠ABB1;
判斷當(dāng)a+∠EAC+∠ABB1 =π/2 時(shí);
提取當(dāng)前BC長(zhǎng)度;
式中:π表示圓周率����,AB表示A點(diǎn)與B點(diǎn)之間距離,AC表示A點(diǎn)與C點(diǎn)之間距離�,BC表示動(dòng)臂油缸長(zhǎng)度,即B點(diǎn)與C點(diǎn)之間距離����,∠EAC表示E點(diǎn)、A點(diǎn)�����、C點(diǎn)形成的夾角����,∠ABB1表示A點(diǎn)、B點(diǎn)���、B1點(diǎn)形成的夾角��,a表示動(dòng)臂相對(duì)平臺(tái)位移角度;
鏟斗姿態(tài):
GJ長(zhǎng)度為鏟斗油缸最小到最大尺寸中,間隔1mm循環(huán)計(jì)算����,
∠GHJ=acos((GH^2+HJ^2-GJ^2)/(2*GH*HJ));
∠JGH=acos((GH^2+GJ^2-HJ^2)/(2*GH*GJ));
∠GJH=π-∠JGH-∠GHJ;
∠JHK=∠GHK-∠GHJ;
JK=(HJ^2+HK^2-2*HJ*HK*cos(∠JHK))^0.5;
∠JKL=acos((JK^2+KL^2-JL^2)/(2*JK*KL));
∠JLK=acos((JL^2+KL^2-JK^2)/(2*JL*KL));
∠JKH=acos((HK^2+JK^2-HJ^2)/(2*JK*HK));
∠LJH=2π-∠JHK-∠JKH-∠JKL-∠JLK;
Fbucket=(pc*sc)*10^6;
Fwbucket=((Fbucket*sin(∠GJH)/sin(∠LJH))*sin(∠JLK)*KL)/(KM);
式中: GJ表示鏟斗油缸長(zhǎng)度�,即G點(diǎn)與J點(diǎn)之間距離;∠GHJ表示G點(diǎn)��、H點(diǎn)�����、J點(diǎn)形成的夾角����,GH表示G點(diǎn)與H點(diǎn)之間距離,HJ表示H點(diǎn)與J點(diǎn)之間距離���,∠JGH表示J點(diǎn)����、G點(diǎn)����、H點(diǎn)形成的夾角,∠GJH表示G點(diǎn)�����、J點(diǎn)、H點(diǎn)形成的夾角����,∠GHK表示G點(diǎn)、H點(diǎn)�、K點(diǎn)形成的夾角,∠JHK表示J點(diǎn)����、H點(diǎn)、K點(diǎn)形成的夾角����,JK表示J點(diǎn)與K點(diǎn)之間距離,HK表示H點(diǎn)與K點(diǎn)之間距離�����,∠JKL表示J點(diǎn)���、K點(diǎn)���、L點(diǎn)形成的夾角,KL表示K點(diǎn)與L點(diǎn)之間距離���,JL表示J點(diǎn)與L點(diǎn)之間距離�����,∠JLK表示J點(diǎn)���、L點(diǎn)、K點(diǎn)形成的夾角���,∠JKH表示J點(diǎn)���、K點(diǎn)、H點(diǎn)形成的夾角���,∠LJH表示L點(diǎn)�、J點(diǎn)�、H點(diǎn)形成的夾角,F(xiàn)bucket表示鏟斗油缸力��,pc表示鏟斗油缸大腔壓力;sc表示鏟斗油缸大腔面積;KM表示K點(diǎn)與M點(diǎn)之間距離��,F(xiàn)wbucket表示鏟斗挖掘力�,在循環(huán)中找到最大鏟斗挖掘力�����,提取最大鏟斗挖掘力姿態(tài)GJ長(zhǎng)度;
斗桿姿態(tài):
確定出GJ后��,計(jì)算斗桿最大挖掘力�����,
DF長(zhǎng)度為斗桿油缸最小到最大尺寸中��,間隔1mm循環(huán)計(jì)算��,
∠EFD=acos((DF^2+EF^2-ED^2)/(2*DF*EF));
Farm=(pa*sa)*10^6;
EM=(EK^2+KM^2-2*EK*KM*cos(π-c))^0.5;
Fwarm=(Farm*sin(∠EFD)*EF)/(EM);
式中: DF表示斗桿油缸長(zhǎng)度���,即D點(diǎn)與F點(diǎn)之間距離;∠EFD表示E點(diǎn)、F點(diǎn)��、D點(diǎn)形成的夾角�����,EF表示E點(diǎn)與F點(diǎn)之間距離�����,ED表示E點(diǎn)與D點(diǎn)之間距離,F(xiàn)arm表示斗桿油缸力�,pa表示斗桿油缸大腔壓力;sa表示斗桿油缸大腔面積;EM表示E點(diǎn)與M點(diǎn)之間距離,F(xiàn)warm表示斗桿挖掘力���,在循環(huán)中找到最大斗桿挖掘力,提取最大斗桿挖掘力姿態(tài)DF長(zhǎng)度;
綜上��,儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度���。
8.根據(jù)權(quán)利要求7所述的挖掘機(jī)自動(dòng)挖掘力測(cè)試方法���,其特征在于,
整車控制器通過最大挖掘力油缸長(zhǎng)度程序計(jì)算得到動(dòng)臂相對(duì)平臺(tái)位移角度a :
a=acos((AB^2+AC^2-BC^2)/(2*AB*AC))-∠EAC-∠ABB1;
計(jì)算得到斗桿相對(duì)動(dòng)臂位移角度b:
b=-(π-(2*π-∠AED-∠FEK-acos((ED^2+EF^2-DF^2)/(2*DE*EF))));
式中: ∠AED表示A點(diǎn)����、E點(diǎn)、D點(diǎn)形成的夾角��,∠FEK表示F點(diǎn)���、E點(diǎn)�����、K點(diǎn)形成的夾角;
計(jì)算得到鏟斗相對(duì)斗桿位移角度c:
∠GHJ=acos((GH^2+HJ^2-GJ^2)/(2*GH*HJ));
∠JGH=acos((GH^2+GJ^2-HJ^2)/(2*GH*GJ));
∠GJH=π-∠JGH-∠GHJ;
∠JHK=∠GHK-∠GHJ;
JK=(HJ^2+HK^2-2*HJ*HK*cos(∠JHK))^0.5;
∠JKL=acos((JK^2+KL^2-JL^2)/(2*JK*KL));
∠JKH=acos((HK^2+JK^2-HJ^2)/(2*JK*HK));
c=-(π-(2*π-∠EKH-∠JKL-∠MKL-∠JKH));
所述拉繩應(yīng)調(diào)節(jié)的高度�����、角度的計(jì)算具體步驟如下:
計(jì)算動(dòng)臂前支座即斗桿后支座絞點(diǎn)E點(diǎn)坐標(biāo)位置:
Ye=AE*cos(a);
Ze=AE*sin(a);
式中:Ye表示E點(diǎn)在橫坐標(biāo)的位置����,Ze表示E點(diǎn)在縱坐標(biāo)的位置;AE表示A點(diǎn)與E點(diǎn)之間距離;
計(jì)算斗齒尖M點(diǎn)坐標(biāo)位置:
Ym=EK*cos(a+b)+AE*cos(a)+KM*cos(a+b+c);
Zm=EK*sin(a+b)+AE*sin(a)+KM*sin(a+b+c);
式中,Ym表示M點(diǎn)在橫坐標(biāo)的位置����,Zm表示M點(diǎn)在縱坐標(biāo)的位置;
因此可以計(jì)算得到拉繩在地錨上的固定點(diǎn);
斗桿挖掘力拉繩在地錨上的固定點(diǎn)P2:
EM=((Ym-Ye)^2+(Zm-Ze)^2)^0.5;
∠EMK=acos((EM^2+KM^2-EK^2)/(2*EM*KM));
P2=MN2*sin(a-b-c+π/2+∠EMK)+Zm+L1;
式中,P2表示斗桿挖掘力拉繩固定點(diǎn)到坑底距離�����,∠EMK表示E點(diǎn)��、M點(diǎn)����、K點(diǎn)形成的夾角,L1表示平臺(tái)高度����, MN2表示斗桿挖掘力姿態(tài)下拉繩的長(zhǎng)度;
鏟斗挖掘力拉繩在地錨上的固定點(diǎn)P1:
P1=L1-MN1*sin(b+c-a+π/2)+Zm;
式中���,P1表示鏟斗挖掘力拉繩固定點(diǎn)到坑底距離,MN1表示鏟斗挖掘力姿態(tài)下拉繩的長(zhǎng)度���。
說明書
技術(shù)領(lǐng)域
[0001]本發(fā)明屬于挖掘機(jī)挖掘力測(cè)試技術(shù)領(lǐng)域���,具體涉及一種挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)����,本發(fā)明還提供了該系統(tǒng)的測(cè)試方法。
背景技術(shù)
[0002]液壓挖掘機(jī)是土方機(jī)械中應(yīng)用最廣泛的設(shè)備之一����。挖掘力能直接反應(yīng)一臺(tái)挖掘機(jī)的性能。挖掘力分為鏟斗挖掘力和斗桿挖掘力��,也可以同時(shí)產(chǎn)生復(fù)合挖掘力;同時(shí)工作裝置挖掘姿態(tài)的變化��,也影響挖掘力的大小?����,F(xiàn)有技術(shù)完全依賴人眼或手工測(cè)量�����,無法準(zhǔn)確測(cè)試挖掘切向力,且測(cè)試過程繁瑣��。
[0003]中國(guó)發(fā)明專利CN 102995673 A公開了一種應(yīng)用于挖掘機(jī)挖掘力測(cè)試的拉繩定位控制方法�����,包括:根據(jù)傳感器的檢測(cè)結(jié)果得到動(dòng)臂���、斗桿和鏟斗的位姿信息;根據(jù)所述位姿信息確定挖掘軌跡;根據(jù)所述挖掘軌跡確定以鏟斗的齒根為切點(diǎn)�、沿挖掘軌跡切線方向設(shè)置的拉繩在錨架上的錨固位置���。在此發(fā)明技術(shù)方案中����,采用傳感器檢測(cè)動(dòng)臂���、斗桿和鏟斗的位姿信息�,控制裝置根據(jù)位姿信息確定挖掘軌跡并最終得到拉繩在錨架上的錨固位置���。此發(fā)明僅簡(jiǎn)單介紹了使用此方法可定位拉繩����,測(cè)試挖掘力,對(duì)于具體如何測(cè)試挖掘力并未給出具體的方法���。
發(fā)明內(nèi)容
[0004]為了克服現(xiàn)有技術(shù)無法準(zhǔn)確測(cè)試挖掘機(jī)切向力及測(cè)試過程繁瑣的缺陷�,本發(fā)明提供一種僅需采集油缸壓力���、位移、拉力����,通過儀表控制器與整車控制器通訊,點(diǎn)擊開始�,即可自動(dòng)完成挖掘力測(cè)試�����,實(shí)現(xiàn)無人化測(cè)試的一種挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)及方法。
[0005]本發(fā)明為了實(shí)現(xiàn)上述目的所采用的技術(shù)方案是:
一種挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)包括:
儀表控制器,用于獲取挖掘機(jī)的工作裝置參數(shù)��,根據(jù)工作裝置參數(shù)來判斷挖掘機(jī)測(cè)試姿態(tài)���,在判斷挖掘機(jī)測(cè)試姿態(tài)后����,得出動(dòng)臂油缸�、斗桿油缸、鏟斗油缸三個(gè)油缸長(zhǎng)度信息���,同時(shí)將自動(dòng)測(cè)試開始指令及三個(gè)油缸長(zhǎng)度信息發(fā)送給整車控制器;接收整車控制器發(fā)送的測(cè)試數(shù)據(jù)并進(jìn)行判斷���,在判斷合格后記錄鏟斗挖掘力及斗桿挖掘力數(shù)據(jù);不合格�����,繼續(xù)發(fā)送三個(gè)油缸長(zhǎng)度信息給整車控制器,直至測(cè)試數(shù)據(jù)記錄合格結(jié)束;
整車控制器接收儀表控制器發(fā)送的三個(gè)油缸長(zhǎng)度信息及自動(dòng)測(cè)試指令后����,自動(dòng)挖掘力測(cè)試程序開始工作,通過最大挖掘力油缸長(zhǎng)度程序計(jì)算出動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a�、斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c�����、拉繩應(yīng)調(diào)節(jié)的高度��、角度,拉繩自動(dòng)調(diào)節(jié)到指定位置;同時(shí)將傳感器發(fā)送的測(cè)試數(shù)據(jù)反饋給儀表控制器;
傳感器用于采集在鏟斗油缸和斗桿油缸緩慢加載過程中主泵溢流時(shí)的測(cè)試數(shù)據(jù)�����,同時(shí)將測(cè)試數(shù)據(jù)發(fā)送給整車控制器��。
[0006]所述挖掘機(jī)測(cè)試姿態(tài)包括最大挖掘力測(cè)試姿態(tài)和普通測(cè)試姿態(tài);若挖掘機(jī)測(cè)試姿態(tài)為最大挖掘力姿態(tài)��,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)動(dòng)臂油缸��、斗桿油缸�、鏟斗油缸三個(gè)油缸長(zhǎng)度;若測(cè)試姿態(tài)為普通姿態(tài)或儀表控制器判斷測(cè)試數(shù)據(jù)不合格時(shí),則需手動(dòng)輸入動(dòng)臂油缸��、斗桿油缸����、鏟斗油缸三個(gè)油缸長(zhǎng)度。
[0007]進(jìn)一步的���,所述測(cè)試數(shù)據(jù)包括動(dòng)臂油缸�、斗桿油缸和鏟斗油缸的壓力���、位移��、拉力數(shù)據(jù)��。
[0008]更進(jìn)一步的�,所述傳感器包括安裝在動(dòng)臂油缸、斗桿油缸和鏟斗油缸上的拉線位移傳感器����、壓力傳感器��、安裝在地錨與鏟斗之間的測(cè)力計(jì)傳感器��。
[0009]本發(fā)明還提供了一種挖掘機(jī)自動(dòng)挖掘力測(cè)試方法�,包括以下步驟:
(1)通過儀表控制器確定測(cè)試姿態(tài),得出動(dòng)臂油缸�、斗桿油缸�����、鏟斗油缸三個(gè)油缸長(zhǎng)度���,并把數(shù)據(jù)發(fā)送給整車控制器;
(2)通過整車控制器自動(dòng)計(jì)算動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a����、斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c及拉繩應(yīng)調(diào)節(jié)的高度�、角度,拉繩自動(dòng)調(diào)節(jié)到指定位置;
(3)在鏟斗油缸及斗桿油缸的緩慢加載中����,主泵出現(xiàn)溢流后,傳感器將測(cè)試數(shù)據(jù)反饋給整車控制器����,整車控制器將測(cè)試數(shù)據(jù)傳送給儀表控制器;
(4)儀表控制器進(jìn)行判斷,記錄合格后的鏟斗挖掘力及斗桿挖掘力數(shù)據(jù);不合格�,則繼續(xù)將動(dòng)臂油缸、斗桿油缸��、鏟斗油缸三個(gè)油缸長(zhǎng)度發(fā)送給整車控制器�����,以此循環(huán)(2)�、(3)、(4)����,直至判斷記錄合格結(jié)束。
[0010]進(jìn)一步的��,所述三個(gè)油缸長(zhǎng)度的長(zhǎng)度信息獲取方式是根據(jù)挖掘機(jī)測(cè)試姿態(tài)來選擇下述其一方式進(jìn)行獲取:
(1)若挖掘機(jī)測(cè)試姿態(tài)為最大挖掘力姿態(tài)����,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度;
(2)若測(cè)試姿態(tài)為普通姿態(tài)或儀表控制器判斷測(cè)試數(shù)據(jù)不合格時(shí),則需手動(dòng)輸入三個(gè)油缸長(zhǎng)度���。
[0011]進(jìn)一步的���,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度的步驟如下:
在已知挖掘機(jī)的型號(hào)及工作裝置尺寸的情況下,以回轉(zhuǎn)中心與水平線的交點(diǎn)為絕對(duì)坐標(biāo)系的原點(diǎn)o��,正前方為水平軸y正方向�,正上方為縱軸z正方向建立二維坐標(biāo)系�����,同時(shí)為了便于計(jì)算�����,在挖掘機(jī)工作裝置上設(shè)置有A-M點(diǎn)位����,用于標(biāo)識(shí)及坐標(biāo)點(diǎn)計(jì)算����,A表示動(dòng)臂后支座絞點(diǎn)����,B表示動(dòng)臂油缸大腔絞點(diǎn),B1表示B點(diǎn)水平軸負(fù)方向平移點(diǎn)���,不代表具體位置�����,只做方向使用�,C表示動(dòng)臂中支座即動(dòng)臂油缸小腔絞點(diǎn)����,D表示斗桿油缸大腔絞點(diǎn),E表示動(dòng)臂前支座即斗桿后支座絞點(diǎn)�,F(xiàn)表示斗桿油缸小腔絞點(diǎn),G表示鏟斗油缸大腔絞點(diǎn)�����,J表示鏟斗油缸小腔絞點(diǎn)���,H表示斗桿中支座絞點(diǎn)�,K表示斗桿前支座即鏟斗后耳板絞點(diǎn),L表示鏟斗前耳板絞點(diǎn)���,M表示斗齒尖;
動(dòng)臂姿態(tài):
BC長(zhǎng)度為動(dòng)臂油缸最小到最大尺寸中����,間隔1mm循環(huán)計(jì)算�,
a=acos((AB^2+AC^2-BC^2)/(2*AB*AC))-∠EAC-∠ABB1;
判斷當(dāng)a+∠EAC+∠ABB1 =π/2 時(shí);
提取當(dāng)前BC長(zhǎng)度;
式中:π表示圓周率,AB表示A點(diǎn)與B點(diǎn)之間距離����,AC表示A點(diǎn)與C點(diǎn)之間距離,BC表示動(dòng)臂油缸長(zhǎng)度����,即B點(diǎn)與C點(diǎn)之間距離�,∠EAC表示E點(diǎn)、A點(diǎn)���、C點(diǎn)形成的夾角�,∠ABB1表示A點(diǎn)��、B點(diǎn)、B1點(diǎn)形成的夾角��,a表示動(dòng)臂相對(duì)平臺(tái)位移角度;
鏟斗姿態(tài):
GJ長(zhǎng)度為鏟斗油缸最小到最大尺寸中��,間隔1mm循環(huán)計(jì)算����,
∠GHJ=acos((GH^2+HJ^2-GJ^2)/(2*GH*HJ));
∠JGH=acos((GH^2+GJ^2-HJ^2)/(2*GH*GJ));
∠GJH=π-∠JGH-∠GHJ;
∠JHK=∠GHK-∠GHJ;
JK=(HJ^2+HK^2-2*HJ*HK*cos(∠JHK))^0.5;
∠JKL=acos((JK^2+KL^2-JL^2)/(2*JK*KL));
∠JLK=acos((JL^2+KL^2-JK^2)/(2*JL*KL));
∠JKH=acos((HK^2+JK^2-HJ^2)/(2*JK*HK));
∠LJH=2π-∠JHK-∠JKH-∠JKL-∠JLK;
Fbucket=(pc*sc)*10^6;
Fwbucket=((Fbucket*sin(∠GJH)/sin(∠LJH))*sin(∠JLK)*KL)/(KM);
式中: GJ表示鏟斗油缸長(zhǎng)度,即G點(diǎn)與J點(diǎn)之間距離;∠GHJ表示G點(diǎn)����、H點(diǎn)、J點(diǎn)形成的夾角�,GH表示G點(diǎn)與H點(diǎn)之間距離,HJ表示H點(diǎn)與J點(diǎn)之間距離���,∠JGH表示J點(diǎn)���、G點(diǎn)、H點(diǎn)形成的夾角���,∠GJH表示G點(diǎn)���、J點(diǎn)�����、H點(diǎn)形成的夾角�,∠GHK表示G點(diǎn)���、H點(diǎn)��、K點(diǎn)形成的夾角�,∠JHK表示J點(diǎn)��、H點(diǎn)�����、K點(diǎn)形成的夾角���,JK表示J點(diǎn)與K點(diǎn)之間距離,HK表示H點(diǎn)與K點(diǎn)之間距離��,∠JKL表示J點(diǎn)�����、K點(diǎn)、L點(diǎn)形成的夾角�����,KL表示K點(diǎn)與L點(diǎn)之間距離�,JL表示J點(diǎn)與L點(diǎn)之間距離,∠JLK表示J點(diǎn)����、L點(diǎn)、K點(diǎn)形成的夾角��,∠JKH表示J點(diǎn)�����、K點(diǎn)�����、H點(diǎn)形成的夾角����,∠LJH表示L點(diǎn)、J點(diǎn)、H點(diǎn)形成的夾角�,F(xiàn)bucket表示鏟斗油缸力,pc鏟斗油缸大腔壓力;sc表示鏟斗油缸大腔面積;KM表示K點(diǎn)與M點(diǎn)之間距離�,F(xiàn)wbucket表示鏟斗挖掘力,在循環(huán)中找到最大鏟斗挖掘力�,提取最大鏟斗挖掘力姿態(tài)GJ長(zhǎng)度;
斗桿姿態(tài):
確定出GJ后,計(jì)算斗桿最大挖掘力�,
DF長(zhǎng)度為斗桿油缸最小到最大尺寸中,間隔1mm循環(huán)計(jì)算���,
∠EFD=acos((DF^2+EF^2-ED^2)/(2*DF*EF));
Farm=(pa*sa)*10^6;
EM=(EK^2+KM^2-2*EK*KM*cos(π-c))^0.5;
Fwarm=(Farm*sin(∠EFD)*EF)/(EM);
式中: DF表示斗桿油缸長(zhǎng)度���,即D點(diǎn)與F點(diǎn)之間距離;∠EFD表示E點(diǎn)、F點(diǎn)��、D點(diǎn)形成的夾角����,EF表示E點(diǎn)與F點(diǎn)之間距離,ED表示E點(diǎn)與D點(diǎn)之間距離����,F(xiàn)arm表示斗桿油缸力,pa表示斗桿油缸大腔壓力;sa表示斗桿油缸大腔面積;EM表示E點(diǎn)與M點(diǎn)之間距離���,F(xiàn)warm表示斗桿挖掘力�,在循環(huán)中找到最大斗桿挖掘力��,提取最大斗桿挖掘力姿態(tài)DF長(zhǎng)度;
綜上��,儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度�。
[0012]進(jìn)一步的,整車控制器通過最大挖掘力油缸長(zhǎng)度程序計(jì)算得到動(dòng)臂相對(duì)平臺(tái)位移角度a :
a=acos((AB^2+AC^2-BC^2)/(2*AB*AC))-∠EAC-∠ABB1;
計(jì)算得到斗桿相對(duì)動(dòng)臂位移角度b:
b=-(π-(2*π-∠AED-∠FEK-acos((ED^2+EF^2-DF^2)/(2*DE*EF))));
式中: ∠AED表示A點(diǎn)���、E點(diǎn)�����、D點(diǎn)形成的夾角�����,∠FEK表示F點(diǎn)����、E點(diǎn)�����、K點(diǎn)形成的夾角;
計(jì)算得到鏟斗相對(duì)斗桿位移角度c:
∠GHJ=acos((GH^2+HJ^2-GJ^2)/(2*GH*HJ));
∠JGH=acos((GH^2+GJ^2-HJ^2)/(2*GH*GJ));
∠GJH=π-∠JGH-∠GHJ;
∠JHK=∠GHK-∠GHJ;
JK=(HJ^2+HK^2-2*HJ*HK*cos(∠JHK))^0.5;
∠JKL=acos((JK^2+KL^2-JL^2)/(2*JK*KL));
∠JKH=acos((HK^2+JK^2-HJ^2)/(2*JK*HK));
c=-(π-(2*π-∠EKH-∠JKL-∠MKL-∠JKH));
所述拉繩應(yīng)調(diào)節(jié)的高度、角度的計(jì)算具體步驟如下:
計(jì)算動(dòng)臂前支座即斗桿后支座絞點(diǎn)E點(diǎn)坐標(biāo)位置:
Ye=AE*cos(a);
Ze=AE*sin(a);
式中:Ye表示E點(diǎn)在橫坐標(biāo)的位置���,Ze表示E點(diǎn)在縱坐標(biāo)的位置;AE表示A點(diǎn)與E點(diǎn)之間距離;
計(jì)算斗齒尖M點(diǎn)坐標(biāo)位置:
Ym=EK*cos(a+b)+AE*cos(a)+KM*cos(a+b+c);
Zm=EK*sin(a+b)+AE*sin(a)+KM*sin(a+b+c);
式中��,Ym表示M點(diǎn)在橫坐標(biāo)的位置���,Zm表示M點(diǎn)在縱坐標(biāo)的位置;
因此可以計(jì)算得到拉繩在地錨上的固定點(diǎn);
斗桿挖掘力拉繩在地錨上的固定點(diǎn)P2:
EM=((Ym-Ye)^2+(Zm-Ze)^2)^0.5;
∠EMK=acos((EM^2+KM^2-EK^2)/(2*EM*KM));
P2 =MN2*sin(a-b-c+π/2+∠EMK)+Zm+L1;
式中,P2表示斗桿挖掘力拉繩固定點(diǎn)到坑底距離��,∠EMK表示E點(diǎn)�、M點(diǎn)、K點(diǎn)形成的夾角���,L1表示平臺(tái)高度�����,MN2表示斗桿挖掘力姿態(tài)下拉繩的長(zhǎng)度;
鏟斗挖掘力拉繩在地錨上的固定點(diǎn)P1:
P1=L1- MN1*sin(b+c-a+π/2)+Zm;
式中���,P1表示鏟斗挖掘力拉繩固定點(diǎn)到坑底距離,MN1表示鏟斗挖掘力姿態(tài)下拉繩的長(zhǎng)度����。
[0013]本發(fā)明通過儀表控制器獲取挖掘機(jī)工作裝置參數(shù)并判斷挖掘機(jī)姿態(tài)�����,在確定了挖掘機(jī)姿態(tài)后自動(dòng)或手動(dòng)將動(dòng)臂油缸、斗桿油缸���、鏟斗油缸三個(gè)油缸的長(zhǎng)度信息輸入整車控制器�,整車控制器計(jì)算出動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a����,斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c及拉繩應(yīng)調(diào)節(jié)的高度�����、角度�����,拉繩自動(dòng)調(diào)節(jié)到指定位置;然后緩慢調(diào)整鏟斗和斗桿����,在主泵溢流后,傳感器將測(cè)試數(shù)據(jù)反饋給整車控制器����,整車控制器將數(shù)據(jù)反饋給儀表控制器���,儀表控制器判斷合格后進(jìn)行記錄,不合格���,繼續(xù)輸入三個(gè)油缸長(zhǎng)度信息�����,直至所有測(cè)試數(shù)據(jù)合格為止�。本發(fā)明在測(cè)試過程�,完全實(shí)現(xiàn)了自動(dòng)挖掘力的測(cè)試,一方面可以準(zhǔn)確得出挖掘切向力�����,另一方面通過整車控制器實(shí)時(shí)調(diào)整拉繩����,無需人工調(diào)整拉繩。
附圖說明
[0014]下面結(jié)合附圖對(duì)本發(fā)明作進(jìn)一步描述��,其中:
圖1為挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)圖;
圖2為挖掘機(jī)工作狀態(tài)示意圖;
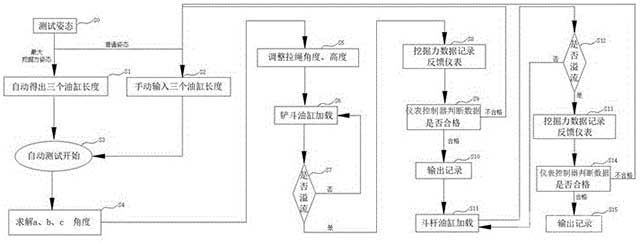
圖3為挖掘機(jī)自動(dòng)挖掘力測(cè)試方法流程示意圖���。
具體實(shí)施方式
[0015]實(shí)施例1
[0016]如圖1�����、2所示����,本實(shí)施例的挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)��,包括:
儀表控制器���,用于獲取挖掘機(jī)的工作裝置參數(shù)��,根據(jù)工作裝置參數(shù)來判斷挖掘機(jī)測(cè)試姿態(tài)�����,在判斷挖掘機(jī)測(cè)試姿態(tài)后�,得出動(dòng)臂油缸�����、斗桿油缸��、鏟斗油缸三個(gè)油缸長(zhǎng)度信息,同時(shí)將自動(dòng)測(cè)試開始指令及三個(gè)油缸長(zhǎng)度信息發(fā)送給整車控制器;接收整車控制器發(fā)送的測(cè)試數(shù)據(jù)并進(jìn)行判斷����,在判斷合格后記錄鏟斗挖掘力及斗桿挖掘力數(shù)據(jù);不合格,繼續(xù)發(fā)送三個(gè)油缸長(zhǎng)度信息給整車控制器����,直至測(cè)試數(shù)據(jù)記錄合格結(jié)束;
整車控制器接收儀表控制器發(fā)送的三個(gè)油缸長(zhǎng)度信息及自動(dòng)測(cè)試指令后,自動(dòng)挖掘力測(cè)試程序開始工作�,通過最大挖掘力油缸長(zhǎng)度程序計(jì)算出動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a、斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b��、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c����、拉繩應(yīng)調(diào)節(jié)的高度、角度����,拉繩自動(dòng)調(diào)節(jié)到指定位置;同時(shí)將傳感器發(fā)送的測(cè)試數(shù)據(jù)反饋給儀表控制器;
傳感器用于采集在鏟斗油缸和斗桿油缸緩慢加載過程中主泵溢流時(shí)的測(cè)試數(shù)據(jù),同時(shí)將測(cè)試數(shù)據(jù)發(fā)送給整車控制器�。
[0017]進(jìn)一步地,所述挖掘機(jī)測(cè)試姿態(tài)包括最大挖掘力測(cè)試姿態(tài)和普通測(cè)試姿態(tài);若挖掘機(jī)測(cè)試姿態(tài)為最大挖掘力姿態(tài)����,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)動(dòng)臂油缸����、斗桿油缸����、鏟斗油缸三個(gè)油缸長(zhǎng)度;若測(cè)試姿態(tài)為普通姿態(tài)或儀表控制器判斷測(cè)試數(shù)據(jù)不合格時(shí),則需手動(dòng)輸入動(dòng)臂油缸����、斗桿油缸、鏟斗油缸三個(gè)油缸長(zhǎng)度���,所述測(cè)試數(shù)據(jù)包括動(dòng)臂油缸、斗桿油缸和鏟斗油缸的壓力�����、位移����、拉力數(shù)據(jù)。
[0018]更進(jìn)一步的����,所述傳感器包括安裝在動(dòng)臂油缸�、斗桿油缸和鏟斗油缸上的拉線位移傳感器�����、壓力傳感器��、安裝在地錨與鏟斗之間的測(cè)力計(jì)傳感器���,所述傳感器均采用現(xiàn)有通用型號(hào)�����。
[0019]實(shí)施例2
[0020]一種挖掘機(jī)自動(dòng)挖掘力測(cè)試方法����,包括以下步驟:
(1)通過儀表控制器確定測(cè)試姿態(tài)���,得出動(dòng)臂油缸����、斗桿油缸����、鏟斗油缸三個(gè)油缸長(zhǎng)度���,并把數(shù)據(jù)發(fā)送給整車控制器;
(2)通過整車控制器自動(dòng)計(jì)算動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a、斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b����、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c及拉繩應(yīng)調(diào)節(jié)的高度、角度�,拉繩自動(dòng)調(diào)節(jié)到指定位置;
(3)在鏟斗油缸及斗桿油缸的緩慢加載中,主泵出現(xiàn)溢流后��,傳感器將測(cè)試數(shù)據(jù)反饋給整車控制器����,整車控制器將測(cè)試數(shù)據(jù)傳送給儀表控制器;
(4)儀表控制器進(jìn)行判斷,記錄合格后的鏟斗挖掘力及斗桿挖掘力數(shù)據(jù);不合格�����,則繼續(xù)將動(dòng)臂油缸����、斗桿油缸���、鏟斗油缸三個(gè)油缸長(zhǎng)度發(fā)送給整車控制器����,以此循環(huán)(2)、(3)����、(4),直至判斷記錄合格結(jié)束�����。
[0021]進(jìn)一步的�,所述三個(gè)油缸長(zhǎng)度的長(zhǎng)度信息獲取方式是根據(jù)挖掘機(jī)測(cè)試姿態(tài)來選擇下述其一方式進(jìn)行獲取:
(1)若挖掘機(jī)測(cè)試姿態(tài)為最大挖掘力姿態(tài)�,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度;
(2)若測(cè)試姿態(tài)為普通姿態(tài)或儀表控制器判斷測(cè)試數(shù)據(jù)不合格時(shí),則需手動(dòng)輸入三個(gè)油缸長(zhǎng)度�。
[0022]更進(jìn)一步的,通過儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度的步驟如下:
在已知挖掘機(jī)的型號(hào)及工作裝置尺寸的情況下�����,以回轉(zhuǎn)中心與水平線的交點(diǎn)為絕對(duì)坐標(biāo)系的原點(diǎn)o��,正前方為水平軸y正方向��,正上方為縱軸z正方向建立二維坐標(biāo)系,同時(shí)為了便于計(jì)算���,在挖掘機(jī)工作裝置上設(shè)置有A-M點(diǎn)位����,用于標(biāo)識(shí)及坐標(biāo)點(diǎn)計(jì)算����,A表示動(dòng)臂后支座絞點(diǎn),B表示動(dòng)臂油缸大腔絞點(diǎn)��,B1表示B點(diǎn)水平軸負(fù)方向平移點(diǎn)�����,不代表具體位置���,只做方向使用���,C表示動(dòng)臂中支座即動(dòng)臂油缸小腔絞點(diǎn)�����,D表示斗桿油缸大腔絞點(diǎn),E表示動(dòng)臂前支座即斗桿后支座絞點(diǎn)�����,F(xiàn)表示斗桿油缸小腔絞點(diǎn)���,G表示鏟斗油缸大腔絞點(diǎn)�,J表示鏟斗油缸小腔絞點(diǎn)��,H表示斗桿中支座絞點(diǎn)�,K表示斗桿前支座即鏟斗后耳板絞點(diǎn),L表示鏟斗前耳板絞點(diǎn)����,M表示斗齒尖;
動(dòng)臂姿態(tài):
BC長(zhǎng)度為動(dòng)臂油缸最小到最大尺寸中,間隔1mm循環(huán)計(jì)算���,
a=acos((AB^2+AC^2-BC^2)/(2*AB*AC))-∠EAC-∠ABB1;
判斷當(dāng)a+∠EAC+∠ABB1 =π/2 時(shí);
提取當(dāng)前BC長(zhǎng)度;
式中:π表示圓周率����,AB表示A點(diǎn)與B點(diǎn)之間距離��,AC表示A點(diǎn)與C點(diǎn)之間距離���,BC表示動(dòng)臂油缸長(zhǎng)度��,即B點(diǎn)與C點(diǎn)之間距離���,∠EAC表示E點(diǎn)����、A點(diǎn)��、C點(diǎn)形成的夾角�����,∠ABB1表示A點(diǎn)��、B點(diǎn)����、B1點(diǎn)形成的夾角,a表示動(dòng)臂相對(duì)平臺(tái)位移角度;
鏟斗姿態(tài):
GJ長(zhǎng)度為鏟斗油缸最小到最大尺寸中���,間隔1mm循環(huán)計(jì)算�,
∠GHJ=acos((GH^2+HJ^2-GJ^2)/(2*GH*HJ));
∠JGH=acos((GH^2+GJ^2-HJ^2)/(2*GH*GJ));
∠GJH=π-∠JGH-∠GHJ;
∠JHK=∠GHK-∠GHJ;
JK=(HJ^2+HK^2-2*HJ*HK*cos(∠JHK))^0.5;
∠JKL=acos((JK^2+KL^2-JL^2)/(2*JK*KL));
∠JLK=acos((JL^2+KL^2-JK^2)/(2*JL*KL));
∠JKH=acos((HK^2+JK^2-HJ^2)/(2*JK*HK));
∠LJH=2π-∠JHK-∠JKH-∠JKL-∠JLK;
Fbucket=(pc*sc)*10^6;
Fwbucket=((Fbucket*sin(∠GJH)/sin(∠LJH))*sin(∠JLK)*KL)/(KM);
式中: GJ表示鏟斗油缸長(zhǎng)度�,即G點(diǎn)與J點(diǎn)之間距離;∠GHJ表示G點(diǎn)、H點(diǎn)�����、J點(diǎn)形成的夾角���,GH表示G點(diǎn)與H點(diǎn)之間距離����,HJ表示H點(diǎn)與J點(diǎn)之間距離�����,∠JGH表示J點(diǎn)�����、G點(diǎn)����、H點(diǎn)形成的夾角,∠GJH表示G點(diǎn)�、J點(diǎn)、H點(diǎn)形成的夾角���,∠GHK表示G點(diǎn)���、H點(diǎn)����、K點(diǎn)形成的夾角��,∠JHK表示J點(diǎn)����、H點(diǎn)、K點(diǎn)形成的夾角����,JK表示J點(diǎn)與K點(diǎn)之間距離,HK表示H點(diǎn)與K點(diǎn)之間距離�����,∠JKL表示J點(diǎn)���、K點(diǎn)����、L點(diǎn)形成的夾角,KL表示K點(diǎn)與L點(diǎn)之間距離��,JL表示J點(diǎn)與L點(diǎn)之間距離�����,∠JLK表示J點(diǎn)���、L點(diǎn)、K點(diǎn)形成的夾角��,∠JKH表示J點(diǎn)���、K點(diǎn)�、H點(diǎn)形成的夾角�,∠LJH表示L點(diǎn)、J點(diǎn)���、H點(diǎn)形成的夾角�,F(xiàn)bucket表示鏟斗油缸力��,pc表示鏟斗油缸大腔壓力;sc表示鏟斗油缸大腔面積;KM表示K點(diǎn)與M點(diǎn)之間距離,F(xiàn)wbucket表示鏟斗挖掘力����,在循環(huán)中找到最大鏟斗挖掘力,提取最大鏟斗挖掘力姿態(tài)GJ長(zhǎng)度;
斗桿姿態(tài):
確定出GJ后��,計(jì)算斗桿最大挖掘力�,
DF長(zhǎng)度為斗桿油缸最小到最大尺寸中,間隔1mm循環(huán)計(jì)算����,
∠EFD=acos((DF^2+EF^2-ED^2)/(2*DF*EF));
Farm=(pa*sa)*10^6;
EM=(EK^2+KM^2-2*EK*KM*cos(π-c))^0.5;
Fwarm=(Farm*sin(∠EFD)*EF)/(EM);
式中: DF表示斗桿油缸長(zhǎng)度,即D點(diǎn)與F點(diǎn)之間距離;∠EFD表示E點(diǎn)��、F點(diǎn)����、D點(diǎn)形成的夾角,EF表示E點(diǎn)與F點(diǎn)之間距離�,ED表示E點(diǎn)與D點(diǎn)之間距離,F(xiàn)arm表示斗桿油缸力����,pa表示斗桿油缸大腔壓力;sa表示斗桿油缸大腔面積;EM表示E點(diǎn)與M點(diǎn)之間距離,F(xiàn)warm表示斗桿挖掘力����,在循環(huán)中找到最大斗桿挖掘力�,提取最大斗桿挖掘力姿態(tài)DF長(zhǎng)度�,
綜上,儀表控制器自動(dòng)計(jì)算出最大挖掘力姿態(tài)下三個(gè)油缸長(zhǎng)度����。
[0023]更進(jìn)一步的,整車控制器通過最大挖掘力油缸長(zhǎng)度程序計(jì)算得到動(dòng)臂相對(duì)平臺(tái)位移角度a :
a=acos((AB^2+AC^2-BC^2)/(2*AB*AC))-∠EAC-∠ABB1;
計(jì)算得到斗桿相對(duì)動(dòng)臂位移角度b:
b=-(π-(2*π-∠AED-∠FEK-acos((ED^2+EF^2-DF^2)/(2*DE*EF))));
式中: ∠AED表示A點(diǎn)�����、E點(diǎn)��、D點(diǎn)形成的夾角����,∠FEK表示F點(diǎn)�����、E點(diǎn)��、K點(diǎn)形成的夾角;
計(jì)算得到鏟斗相對(duì)斗桿位移角度c:
∠GHJ=acos((GH^2+HJ^2-GJ^2)/(2*GH*HJ));
∠JGH=acos((GH^2+GJ^2-HJ^2)/(2*GH*GJ));
∠GJH=π-∠JGH-∠GHJ;
∠JHK=∠GHK-∠GHJ;
JK=(HJ^2+HK^2-2*HJ*HK*cos(∠JHK))^0.5;
∠JKL=acos((JK^2+KL^2-JL^2)/(2*JK*KL));
∠JKH=acos((HK^2+JK^2-HJ^2)/(2*JK*HK));
c=-(π-(2*π-∠EKH-∠JKL-∠MKL-∠JKH));
所述拉繩應(yīng)調(diào)節(jié)的高度�、角度的計(jì)算具體步驟如下:
計(jì)算動(dòng)臂前支座即斗桿后支座絞點(diǎn)E點(diǎn)坐標(biāo)位置:
Ye=AE*cos(a);
Ze=AE*sin(a);
式中:Ye表示E點(diǎn)在橫坐標(biāo)的位置,Ze表示E點(diǎn)在縱坐標(biāo)的位置;AE表示A點(diǎn)與E點(diǎn)之間距離;
計(jì)算斗齒尖M點(diǎn)坐標(biāo)位置:
Ym=EK*cos(a+b)+AE*cos(a)+KM*cos(a+b+c);
Zm=EK*sin(a+b)+AE*sin(a)+KM*sin(a+b+c);
式中,Ym表示M點(diǎn)在橫坐標(biāo)的位置��,Zm表示M點(diǎn)在縱坐標(biāo)的位置;
因此可以計(jì)算得到拉繩在地錨上的固定點(diǎn);
斗桿挖掘力拉繩在地錨上的固定點(diǎn)P2:
EM=((Ym-Ye)^2+(Zm-Ze)^2)^0.5;
∠EMK=acos((EM^2+KM^2-EK^2)/(2*EM*KM));
P2=MN2*sin(a-b-c+π/2+∠EMK)+Zm+L1;
式中����,P2表示斗桿挖掘力拉繩固定點(diǎn)到坑底距離,∠EMK表示E點(diǎn)��、M點(diǎn)�、K點(diǎn)形成的夾角,L1表示平臺(tái)高度���,MN2表示斗桿挖掘力姿態(tài)下拉繩的長(zhǎng)度;
鏟斗挖掘力拉繩在地錨上的固定點(diǎn)P1:
P1=L1-MN1*sin(b+c-a+π/2)+Zm;
式中����,P1表示鏟斗挖掘力拉繩固定點(diǎn)到坑底距離���,MN1表示鏟斗挖掘力姿態(tài)下拉繩的長(zhǎng)度��。
[0024]如圖3所示���,本實(shí)施例的具體操作流程如下:
S0:開始,確定測(cè)試姿態(tài)����。
[0025]S1:判斷選擇為最大挖掘力姿態(tài)���,儀表控制器自動(dòng)得出動(dòng)臂油缸、斗桿油缸�����、鏟斗油缸三個(gè)油缸長(zhǎng)度�����。
[0026]S2:判斷選擇為普通姿態(tài)��,儀表控制器需手動(dòng)輸入動(dòng)臂油缸���、斗桿油缸、鏟斗油缸三個(gè)油缸長(zhǎng)度����,并把數(shù)據(jù)發(fā)送給整車控制器。
[0027]S3:儀表控制器發(fā)送“自動(dòng)測(cè)試開始”指令給整車控制器���。
[0028]S4:整車控制器自動(dòng)計(jì)算動(dòng)臂相對(duì)回轉(zhuǎn)平臺(tái)運(yùn)動(dòng)角度a����,斗桿相對(duì)動(dòng)臂運(yùn)動(dòng)角度b、鏟斗相對(duì)斗桿運(yùn)動(dòng)角度c�����。
[0029]S5:整車控制器計(jì)算得出拉繩應(yīng)調(diào)節(jié)的高度���、角度參數(shù)���,拉繩自動(dòng)調(diào)節(jié)到指定位置。
[0030]S6:鏟斗油缸緩慢加載�。
[0031]S7:判斷主泵是否溢流,若是進(jìn)入“S8”�����,若不是返回“S6”�。
[0032]S8:傳感器將測(cè)試數(shù)據(jù)反饋給整車控制器,整車控制器并把數(shù)據(jù)發(fā)回儀表控制器���。
[0033]S9:儀表控制器判斷數(shù)據(jù)是否合格��,若合格進(jìn)入“S10”�����,若不合格�,返回“S2”,手動(dòng)輸入動(dòng)臂油缸����、斗桿油缸、鏟斗油缸三個(gè)油缸長(zhǎng)度�����。
[0034]S10:儀表控制器記錄合格鏟斗挖掘力數(shù)據(jù)�����。
[0035]S11:斗桿油缸緩慢加載�。
[0036]S12:判斷主泵是否溢流�����,若是進(jìn)入“S13”�,若不是返回“S11”。
[0037]S13:傳感器將測(cè)試數(shù)據(jù)反饋給整車控制器����,整車控制器并把數(shù)據(jù)發(fā)回儀表控制器。
[0038]S14:儀表控制器判斷數(shù)據(jù)是否合格��,若合格進(jìn)入“S15”����,若不合格,返回“S2”����,手動(dòng)輸入動(dòng)臂油缸���、斗桿油缸�����、鏟斗油缸三個(gè)油缸長(zhǎng)度�����。
[0039]S15:儀表控制器記錄合格鏟斗挖掘力數(shù)據(jù)����。
[0040]顯然��,本領(lǐng)域的技術(shù)人員可以對(duì)本發(fā)明進(jìn)行各種改動(dòng)和變型且不脫離本發(fā)明的精神和范圍�。這樣,倘若本發(fā)明的這些修改和變型屬于本發(fā)明權(quán)利要求及其等同技術(shù)的范圍之內(nèi)�����,則本發(fā)明也意圖包含這些改動(dòng)和變型在內(nèi)�����。
說明書附圖(3)
聲明:
“挖掘機(jī)自動(dòng)挖掘力測(cè)試系統(tǒng)及方法” 該技術(shù)專利(論文)所有權(quán)利歸屬于技術(shù)(論文)所有人���。僅供學(xué)習(xí)研究,如用于商業(yè)用途���,請(qǐng)聯(lián)系該技術(shù)所有人���。
我是此專利(論文)的發(fā)明人(作者)
 151
編輯:中冶有色技術(shù)網(wǎng)
來源:山西太重工程機(jī)械有限公司
151
編輯:中冶有色技術(shù)網(wǎng)
來源:山西太重工程機(jī)械有限公司
 分享 0
分享 0
 舉報(bào) 0
舉報(bào) 0
 收藏 0
收藏 0
 反對(duì) 0
反對(duì) 0
 點(diǎn)贊 0
點(diǎn)贊 0

")

 2025年03月20日 ~ 22日
2025年03月20日 ~ 22日 工業(yè)爐窯及耐火材料產(chǎn)學(xué)研合作高峰論壇")
異質(zhì)材料焊接與連接技術(shù)交流會(huì)")
核材料產(chǎn)學(xué)研合作高峰論壇")
")


 京公網(wǎng)安備 11010702002294號(hào)
京公網(wǎng)安備 11010702002294號(hào)